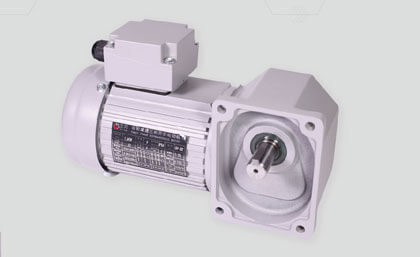
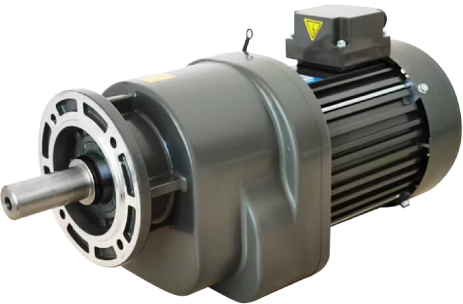
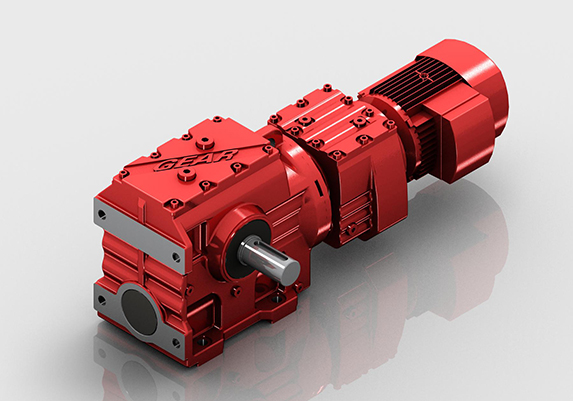
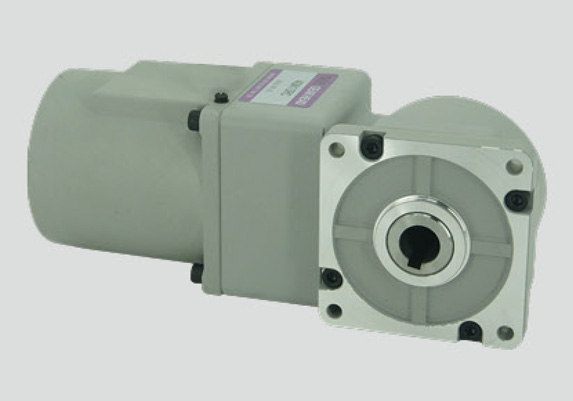
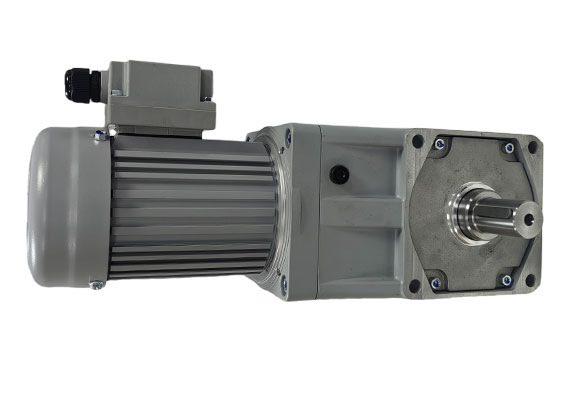
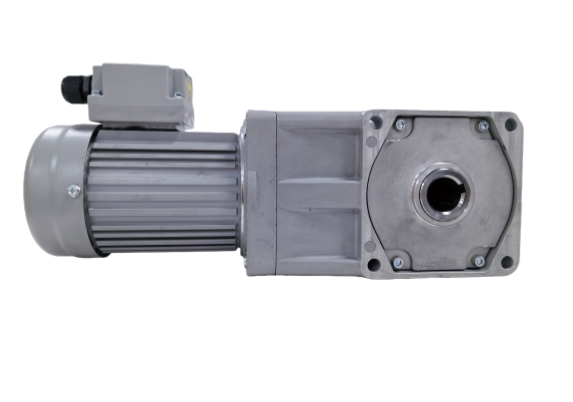
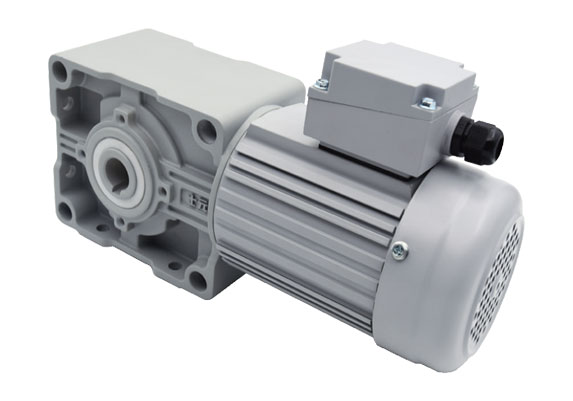
GH卧式三相标准型(刹车)减速马达
GH系列卧式齿轮减速马达

 语言
语言
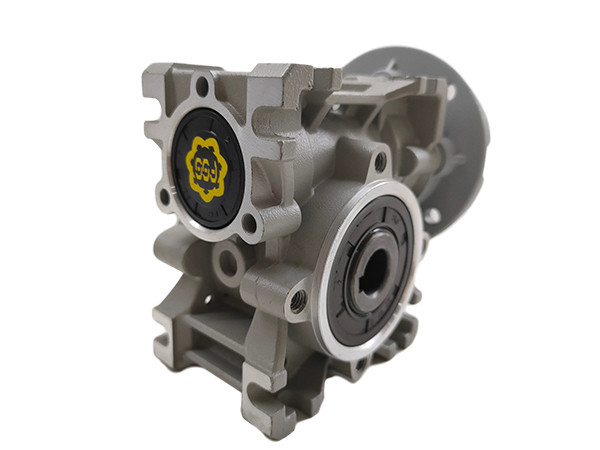
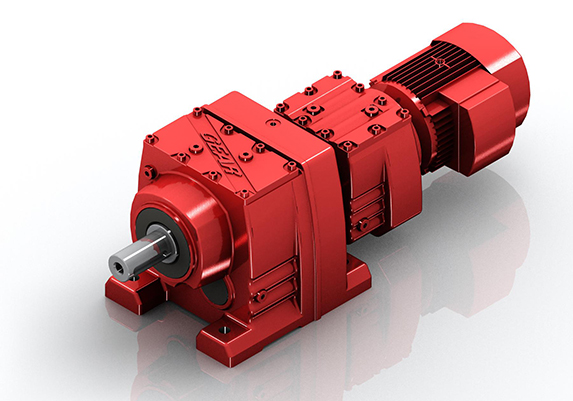
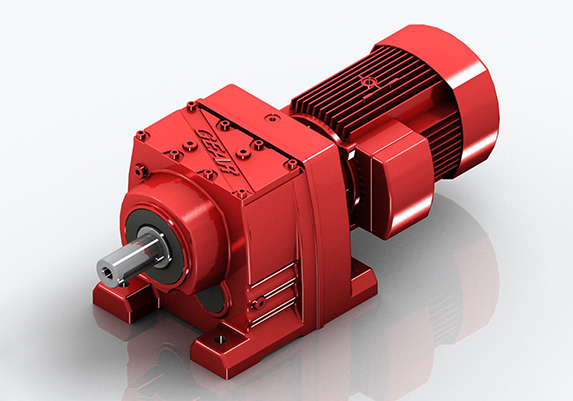
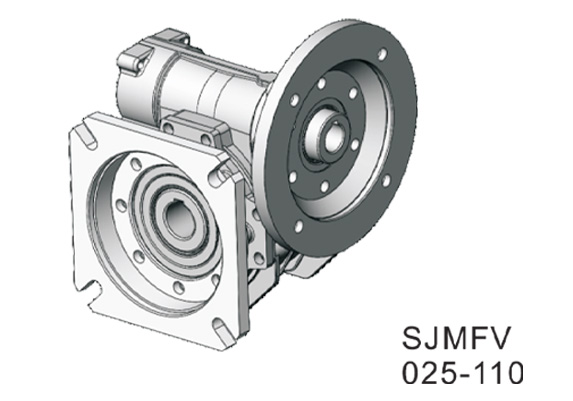
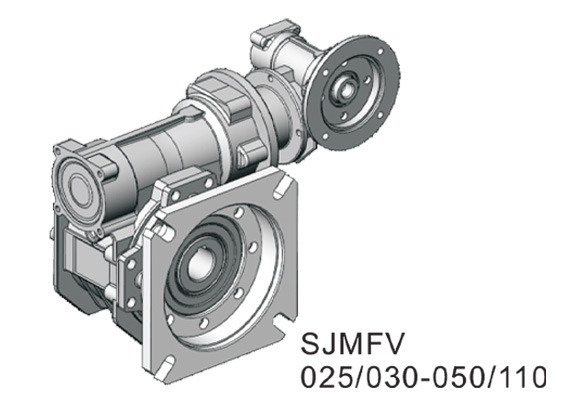
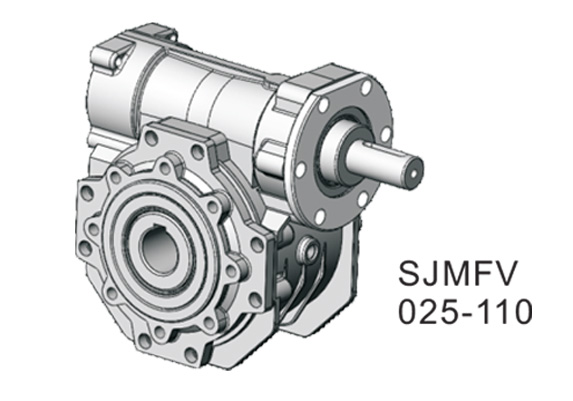
圆锥齿轮+行星齿轮正交传动减速机 的详细原理说明,涵盖结构组成、传动逻辑、力学特性及典型应用:
一、结构组成
1. 核心部件
圆锥齿轮副 (正交传动):
主动锥齿轮(输入轴)与从动锥齿轮(90°交错轴传动)
齿形:格里森弧齿或奥利康摆线齿(降低噪音)
行星齿轮系 (减速主体):
太阳轮(与从动锥齿轮同轴固定)
行星轮(3-6个,均布于太阳轮周围)
内齿圈(固定或输出,取决于设计)
行星架(输出或固定,决定减速比)
2. 辅助系统
轴承:交叉圆锥滚子轴承(承受轴向+径向载荷)
润滑:强制油冷循环系统(针对高速工况)
壳体:分体式铸铁结构(带散热鳍片)
二、传动原理
1. 动力传递路径
复制输入轴 → 主动锥齿轮 → 从动锥齿轮(90°转向) → 太阳轮 → 行星轮 →
↘︎ 行星架输出(若内齿圈固定)
↘︎ 内齿圈输出(若行星架固定)
2. 正交传动阶段
锥齿轮副实现轴向转换 (如水平输入→垂直输出)
传动比计算:
i锥=Z主动Z从动(通常1:1至1:3)
特点:需精确调整齿面接触区(避免偏载)
3. 行星减速阶段
减速比公式 :
i行星=1+Z太阳轮Z内齿圈
多级串联 :可叠加2-3级行星系(总减速比可达100:1以上)
三、力学特性
参数 特点
扭矩容量锥齿轮部分较弱,行星系可承受高扭矩
效率单级锥齿轮≈96%,行星系≈98%(油脂润滑)
轴向力锥齿轮产生轴向推力,需专用轴承抵消
精度行星系分流载荷,传动误差<1弧分
四、典型应用场景
1.风电变桨系统
正交传动适应机舱空间限制
行星系提供高扭矩(≥50kN·m)
2.工程机械回转机构
锥齿轮转向+行星减速集成于液压马达末端
3.航空航天舵机
采用轻量化钛合金齿轮,减速比200:1级
五、设计关键点
1.锥齿轮修形
齿面鼓形加工补偿安装误差
动态啮合斑点控制(接触面积≥60%)
2.行星均载优化
浮动太阳轮设计
行星轮相位角错开(如20°间隔)
3.热平衡计算
锥齿轮高速区需喷油冷却
行星系采用高导热壳体材料
六、故障模式与对策
锥齿轮点蚀 → 提高齿面硬度(HRC58+渗氮处理)
行星轮偏载 → 增加行星架柔性支撑
润滑失效 → 集成温度+油压传感器实时监控
七、前沿技术方向
3D打印齿轮 :拓扑优化减重(如镂空行星架)
磁力辅助啮合 :电磁线圈减少锥齿轮背隙
数字孪生运维 :振动信号AI预测寿命
该结构完美结合了空间转向 与高减速比 需求,但成本高于纯行星减速机,适合对空间布局和扭矩密度要求严苛的领域。

专注于传动系统成套解决方案

扫码添加客服