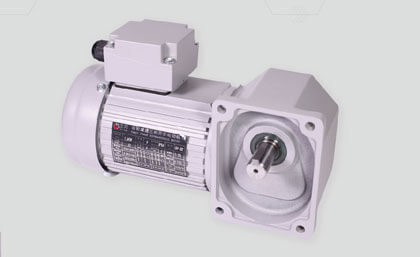
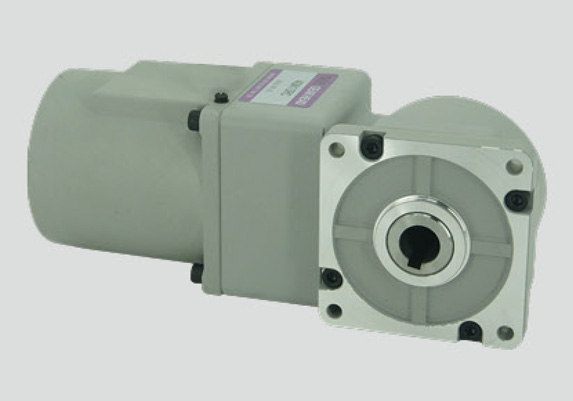
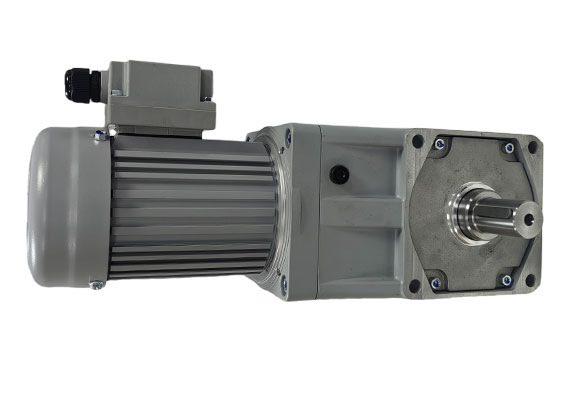
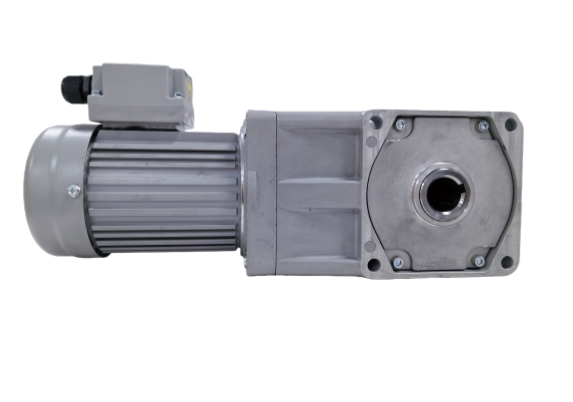
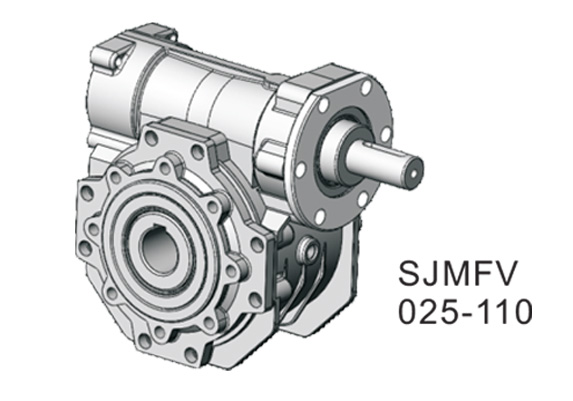
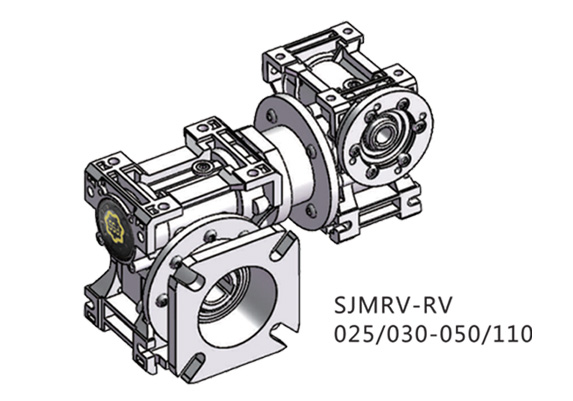
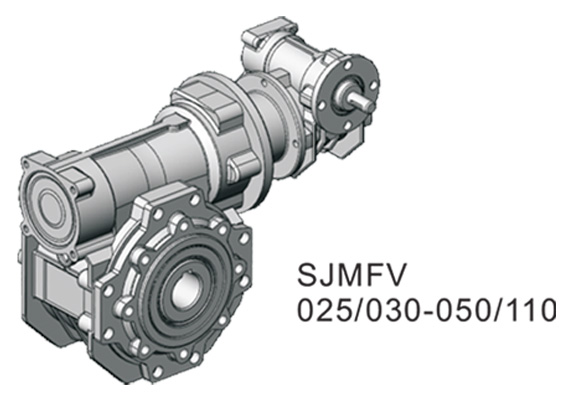
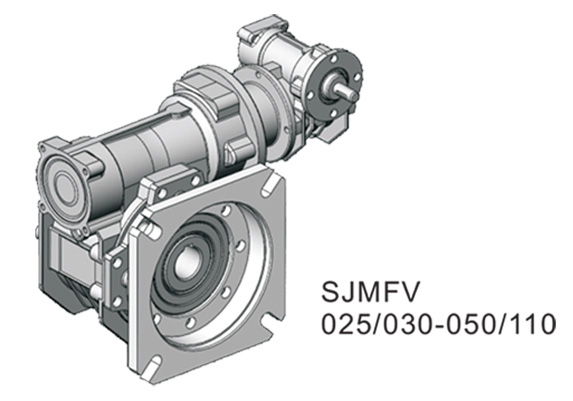
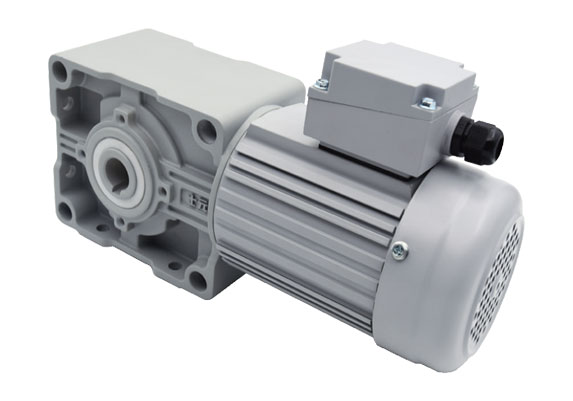
GH卧式三相标准型(刹车)减速马达
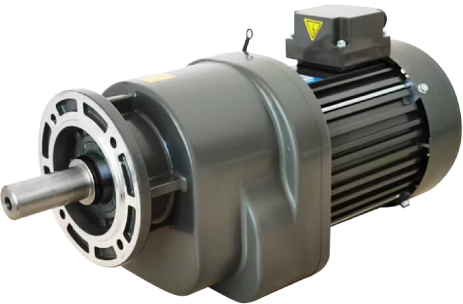
GH系列卧式齿轮减速马达

 语言
语言
调节永磁同步电机的转速,核心在于对电机控制器进行精确的参数整定和算法选择。
控制层面核心目标关键调整参数/方法
核心控制策略 选择实现调速的整体方案矢量控制(VC)、直接转矩控制(DTC)、模型预测控制(MPC)等
速度环调节 确保转速快速、精准、稳定地跟随指令比例增益(Kp)、积分增益(Ki),或采用更先进的滑模控制、自适应控制等
电流环调节 快速准确地输出转矩所需的电流比例增益(Kp)、积分增益(Ki)
高级优化技术 在特定工况下进一步提升性能弱磁控制(扩速)、扰动观测器(抗负载冲击)

核心原理与基础设置
永磁同步电机调速通常采用矢量控制 ,它能够像控制直流电机一样,分别独立地控制励磁电流和转矩电流,从而实现转速的精确调节。
基础参数匹配 :在开始调试前,务必确保控制器中设置的电机基本参数准确无误,包括定子电阻、d/q轴电感、永磁体磁链和转子转动惯量 。这些是控制算法计算的基石。
控制模式选择 :大多数应用会选择速度控制模式 。你需要设定一个目标转速作为控制器的输入指令。
核心参数整定
这是调速的核心环节,主要针对速度环和电流环的PID(主要是PI)参数进行调节。常规做法是先内环后外环 :先调好电流环,再调节速度环。
电流环整定 :
作用 :电流环是内环,负责快速响应,精确控制电机转矩。其响应速度直接影响系统的动态性能。
调整方法 :通常追求高带宽 (快速响应)。可以先设置一个较大的比例增益(Kp),然后慢慢增加积分增益(Ki),直到电流能够快速且无超调地跟踪指令。如果电流响应振荡,应适当减小Kp;如果响应迟缓,则增大Kp。
速度环整定 :
作用 :速度环是外环,根据转速误差计算所需的转矩(电流指令)。
调整方法 :在电流环调好的基础上进行。增大比例增益(Kp)可以加快响应速度,但过大容易引起超调甚至振荡;增大积分增益(Ki)可以消除稳态误差,但过大会导致系统响应变慢或积分饱和。 理想的状态是转速能快速跟上指令,且波动小。
提升动态性能的高级策略
当标准PI调节器无法满足高性能要求(如负载频繁变化、要求极限加减速)时,可以考虑以下策略:
抗扰动设计 :通过扩张状态观测器(ESO) 等算法,实时估计并补偿负载突变等外部扰动,使系统对干扰不敏感,保持转速稳定。
弱磁控制 :当电机转速需要超过额定转速时,需采用弱磁控制技术。通过施加负向的直轴(d轴)电流来削弱磁场,从而实现更高转速的运行。
安全调试指南
调速是一个精细的过程,务必注意安全:
安全第一 :在通电调试前,确保电机已可靠固定,周围无安全隐患。
循序渐进 :参数调整应小幅多次 进行,每次调整后观察系统响应,再决定下一步操作。粗暴地大幅调整参数极易导致系统失控。
记录与观察 :详细记录每次参数修改及对应的响应波形(如转速、电流),这是分析和解决问题的重要依据。
利用仿真 :如果条件允许,可先使用Matlab/Simulink等软件进行仿真建模,验证控制策略的有效性,再应用于实际设备。

专注于传动系统成套解决方案

扫码添加客服