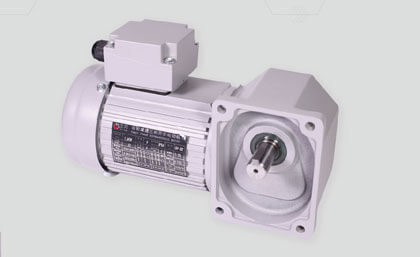
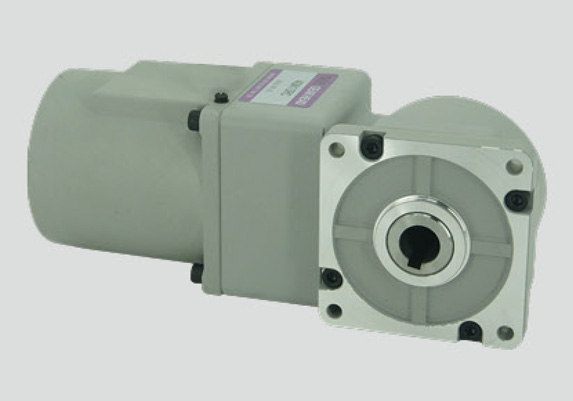
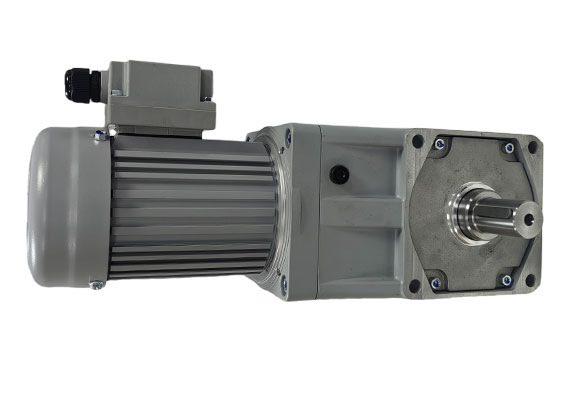
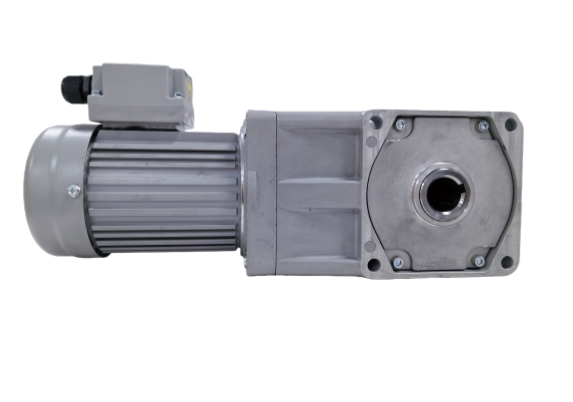
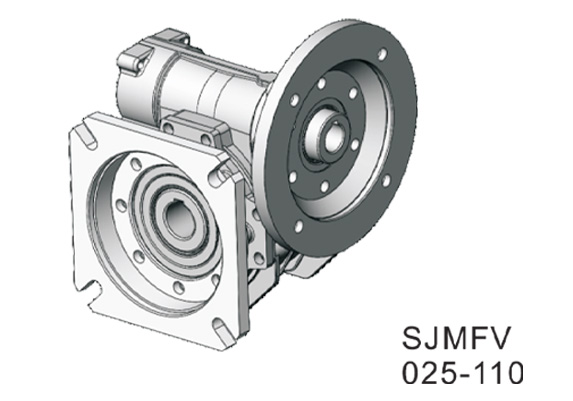
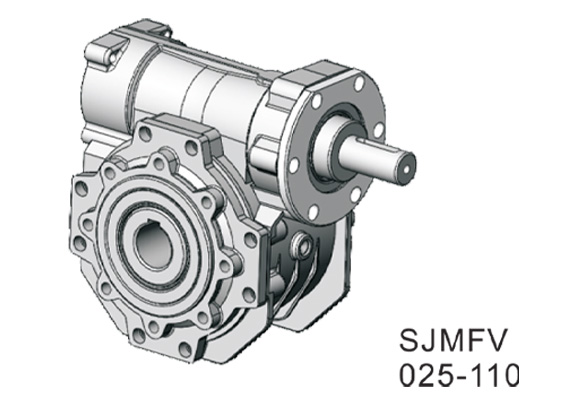
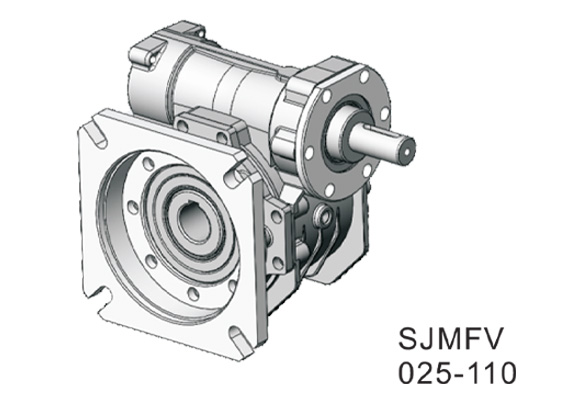
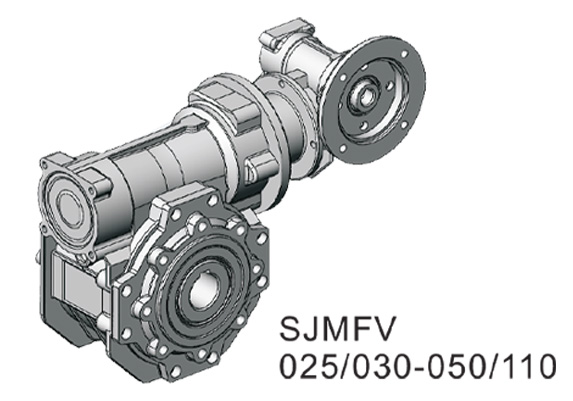
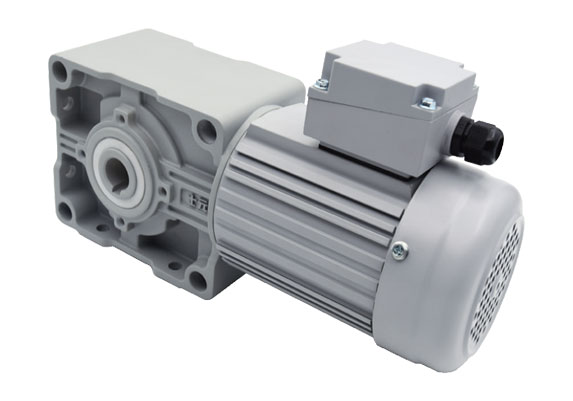
GH卧式三相标准型(刹车)减速马达
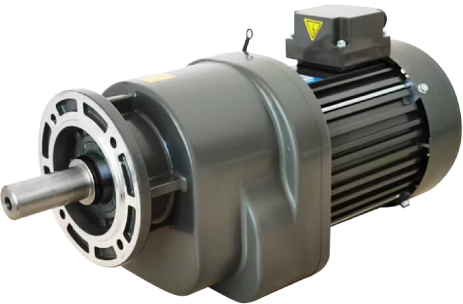
GH系列卧式齿轮减速马达

 语言
语言
电机转向是原因,减速机转向是结果。两者通常是相反的,但最终我们只关心减速机的输出转向是否符合设备要求。
下面我们来详细解释这个区别和它们之间的关系。
1. 电机转向
定义 :指减速机上自带的那个输入电机 的旋转方向。也就是电机轴自身的转动方向(顺时针或逆时针)。
特点 :
对于普通三相异步电机,转向由接入电源的相序(接线顺序)决定。任意调换两相接线即可改变电机转向。
对于带制动器的电机或伺服电机,转向由控制信号决定。
电机转速很高,通常为每分钟几百到几千转。

2. 减速机转向
定义 :指减速机输出轴 的旋转方向。也就是经过齿轮组减速增扭后,最终驱动设备的那个轴的转动方向。
特点 :
这是真正有用 的转向,它直接决定了机械设备(如传送带、搅拌机、机械臂)的运行方向。
输出轴转速很低,但扭矩很大。
核心关系:减速比与齿轮结构
两者方向的关系主要由减速机内部的齿轮结构(单级、多级、行星齿轮、蜗轮蜗杆等)决定。
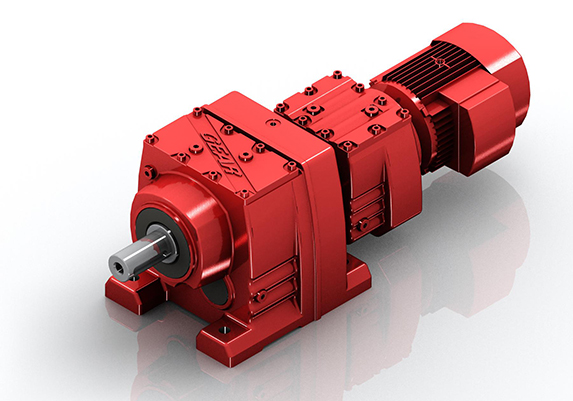
情况一:大多数常见情况(如行星减速机、大多数齿轮减速机)—— 转向相反
规则 :如果减速机的齿轮级数是奇数 (例如单级、三级),那么电机的转向与减速机输出轴的转向相反 。
原理 :每经过一对齿轮啮合,方向就改变一次。奇数次改变最终方向就相反。
电机顺时针转 → 减速机输出轴逆时针转。
电机逆时针转 → 减速机输出轴顺时针转。
情况二:部分情况(如齿轮级数为偶数)—— 转向相同
规则 :如果减速机的齿轮级数是偶数 (例如二级、四级),那么电机的转向与减速机输出轴的转向相同 。
原理 :偶数次齿轮啮合的方向改变,最终方向又变回与初始方向相同。
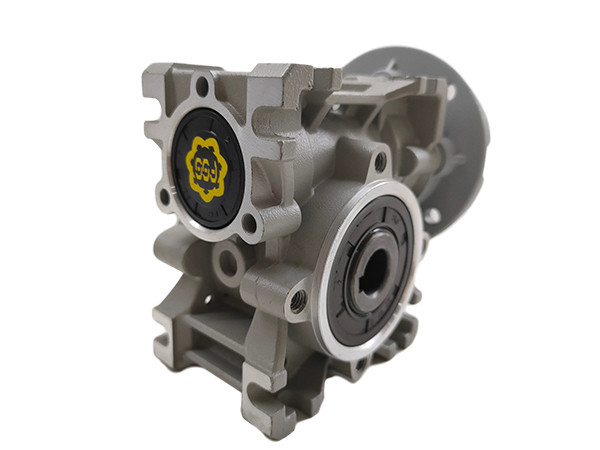
特殊情况:蜗轮蜗杆减速机—— 单向传动,通常不可逆
规则 :蜗轮蜗杆减速机具有自锁特性 。通常情况下,只能是电机(蜗杆)带动输出轴(蜗轮),而输出轴无法反向带动电机。
转向关系 :它们的转向关系是固定的,由蜗杆的螺旋方向决定。电机转向改变,输出轴转向也改变,但它们之间的空间方向是特定的(呈90度角)。
总结与对比表
特性电机转向减速机转向(输出轴转向)
定义 输入动力的高速轴的旋转方向输出动力的低速、高扭矩轴的旋转方向
关注点 是“因”,是过程是“果”,是最终需要的结果
速度/转速 高转速(同步转速如1500rpm, 3000rpm)低转速(减速后的转速,如100rpm, 10rpm)
扭矩 低扭矩高扭矩(经过放大)
方向关系 取决于电源相序或控制信号由电机转向和 减速机内部结构共同决定
在实际应用中的重要性
1.设备方向确认 :在安装调试设备时,必须确认减速机输出轴的转向是否符合设计要求。例如,传送带必须向前走,而不能向后走。
2.调试方法 :如果方向反了,不要去机械上调整 ,而应该:
对于三相电机 :在电源接线端任意交换两条电源线 ,即可改变电机转向,从而改变输出轴转向。
对于伺服/步进电机 :在驱动器参数中设置转向或修改控制程序的方向信号。
3.选型注意 :有些特殊减速机(如某些蜗轮蜗杆)有规定的输入转向,选型时需要留意。
记住最关键的一点:电机转向是输入端,减速机转向是输出端。我们通过控制电机转向来获得正确的减速机输出转向,以确保整个设备的正常运行。 在绝大多数情况下,它们的方向是相反的。

专注于传动系统成套解决方案

扫码添加客服